|
|
|
|
||||||
|
|
2021/12/16 | |||||
|
Ameca莞尔一笑 全世界大吃一惊
|
|
英国开发的这款人形机器人逼真表情背后藏着哪些秘密? |
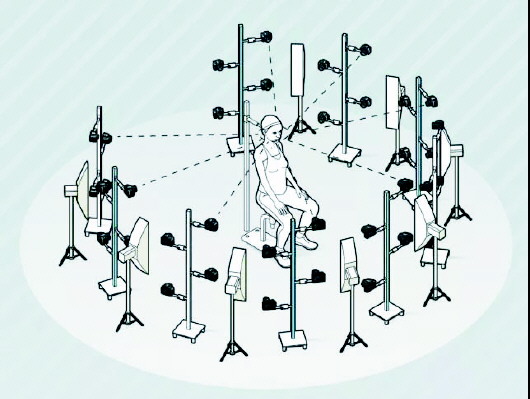
Mesmer技术用摄影测量设备对人体进行360度3D扫描。 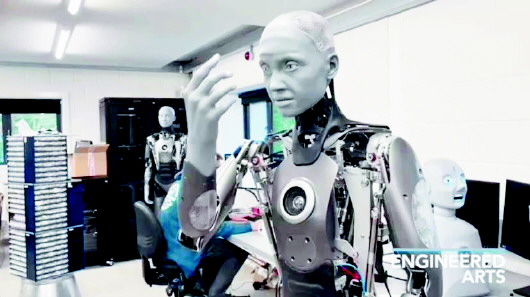
Ameca“惊讶”地看向自己的手,5个灵活的手指,渐渐舒展。它在认真地确认着自己的身份。 或许你根本不敢想象机器人真正苏醒时的样子。 活动肩骨后,它突然间灵魂附体,大梦初醒般睁开双眼。 它先是紧皱眉头,后是做出惊讶不已的表情,让人不得不惊呼《西部世界》来了…… “我是谁?我在哪?”――这或许是它苏醒后最先思考的问题。它惊讶地看向自己的手,5个灵活的手指,渐渐舒展。它在认真地确认着自己的身份。 恍然间,它看向镜头大吃一惊,慢慢低下头流露出害羞的表情,最后莞尔一笑。 你没看错,这是真真切切存在的机器人,名叫Ameca。这款机器人表情细腻丰富,简直逼真到与真人无异,让人细思极恐。 下一步难道是《机械公敌》来临? 除了上面展示的能力之外,Ameca还能做出许多令人惊叹的动作。 比如,“别说话,嘘。”“我的天哪!”“跟着我做。”“你刚刚说了什么?”“我不知道啊!” 那么,Ameca如何做出这些逼真的表情?这背后的功臣便是Engineered Arts经过多年对人形机器人的研究而开发的Mesmer技术。 Mesmer技术 建造仿真人形机器人的系统 Mesmer是一个用于建造仿真人形机器人的系统,也是“Ameca如何做出这些逼真表情”的背后支撑。 这套系统功能强大且成本低廉,可以被用作机器人的内部骨架,其表现力可以说是无可替代,能够表达出非常广泛的人类情感。 Mesmer为机器人Ameca提供了大量的真人表情数据,也正是因为在学习了很多真实的人类表情后,Ameca才能够变得如此惟妙惟肖。 Mesmer技术首先要使用定制的摄影测量设备对人体进行360度的3D扫描。 接着,从不同角度捕捉多个重叠的数码照片,然后通过比较像素的颜色和锚点定位,来重建3D模型。 想要让机器人做出逼真的表情,还需要一张和真人高度相似的人脸。所以在立体光刻3D打印机上制作的模具必须要精确,硅胶填充要让皮肤质感看起来和真人一样。 之后再通过调用设计好的数字模型就可以设计机器人的内部机制,使Ameca生成准确的面部表情,比如微笑、打哈欠、思考、皱眉、惊讶、生气等等。 Engineered Arts认为,如果想要做出真正的类人机器人,应该需要两大核心技术。除了上面人工制作的精细化的肢体,还要有人工智能算法的支持。 在Ameca上,Engineered Arts使用了自主研发的Tritium机器人操作系统,赋予了机器人“人工智能”。 Tritium机器人操作系统 “为金属注入生命的魔法” 独特的机器人需要独特的软件。Tritium机器人操作系统,这种被Engineered Arts称为“为金属注入生命的魔法”,背后到底蕴含着哪些核心技术呢? Tritium历经12年的改进,目前已经发展成了一个全面成熟的平台。 一个足够“聪明”的操作系统,就得让机器人在各种情况下都能保持响应。Tritium设计了一个智能缓冲系统,让Ameca机器人在快速变化的环境中,依然能迅速而“清醒”地做出决策。 举个例子,如果Ameca被同时要求做两件不同的事情,Tritium会站出来解决这个冲突,并以一种安全的顺序来安排行动的优先级,从而防止一些不可预测的混乱行为。 更巧妙的是,Tritium集成在网络浏览器中,用户可以通过任何联网设备远程遥控。只需简单登录,就可以轻松地维护、更新和调整机器人。 在Tritium平台上,能看到哪些东西呢? Ameca身上配备了各种各样的传感器,包括摄像头、麦克风和位置编码器,以及数千个智能设备,而这些传感器的数据都可以在浏览器中实时获得。 除了实时地感知,还要能实时地控制。Tritium还集成了TinMan工具,可以对Ameca机器人进行实时控制,而这个强大的软件也被装进了浏览器中,所以用户不需要任何安装软件。 TinMan可以调用Ameca内置的摄像头和麦克风,轻松实现凝视别人、进入自然对话等动作。 这样一来,机器人便有了“亲和力”。因此,Tritium这个与云连接的平台,很有潜力能够成为“人类与元宇宙之间互动的完美平台”。 ■ 相关链接 既能孔武有力 也可细嗅蔷薇 超级灵活的 机器手问世 要力气时可以捏扁罐头,要精细时可以拿起小镊子,拥有这般“男友力”的其实是一只机器手。据英国《自然・通讯》杂志14日发表一项研究,韩国科学家团队报告了一种机器手集成了响应式运动、传感并拥有高度灵活性所需的所有组件。这种机器手可以安装到现有商业机器手臂上,从抓握鸡蛋到使用剪刀和镊子,能够执行各种各样的任务。 人体全部206块骨头中,有54块在手上,相当于骨头总数的四分之一,而驱动这些骨头的手部肌肉结构也极其复杂,正因如此,人类手的运动看似平常,却涉及相当高的灵巧水平,能从事包括从精细物体的抓取到繁复工具的操作等多种任务。而解释人手极其复杂的功能,迄今为止仍然是领域中尚未解决的挑战。 机器人的手与人类的手有着相似的功能,因此在执行任务时也可以拥有很高的灵活性,实际应用中,机器手有执行跨度很大的任务的潜力。但是,开发没有额外驱动部件使之移动的手,同时保持其高度灵活性或以适当力量抓取的能力是一个巨大挑战。额外驱动部件也使这些手难以集成在现有的机械臂上,限制了它们的用途。 韩国亚洲大学科学家团队此次开发了一种灵活的机器手,称为“ILDA”(集成连接驱动的灵活拟人)。这只手由20个关节组成,允许15度自由移动,指尖力34牛顿,总重不到1.1公斤,体积小巧(218毫米),有触觉传感能力。 研究人员表示,“ILDA”的所有组件都集成到了手上,这意味着它可以无须额外部件(如前臂)就能连接到现有的机械臂上。而一系列实验表明,这只手可以拿起各种形状的物体,强力抓握时可压扁罐头,或精细抓握时拿住一个鸡蛋,同时这只手还可以用剪刀裁纸以及用镊子拿起小物体。 轻轻拿起一颗鸡蛋,既不会用力过度捏爆它,也不会力道过轻把它摔地上,对人类来说是与生俱来的本领,对机器人来说却是个大挑战,这次成功实现表明该机器手在触觉传感、反馈机制、精细操作等方面的巨大进步。 据《成都商报》《科技日报》
|
|
|||
| 相关文章: |